目次
硬派なイメージのカワサキがとんでもない特許を出しています。
昔から漢or男 カワサキとはよく言われたもので、カワサキのバイクと言えば硬派で男らしいイメージが付いていたものです。
いまでもスクーターや小排気量のラインナップはほとんどなく、イメージを貫いていますよね。
もちろん保守的かと言われればそんなことはなく、特に近年だとH2にはこれまでなかったスーパーチャージャーを搭載して世の中のバイクファンを大いに盛り上がらせたものです。
そんなカワサキがとても面白いコンセプトを出したのを覚えておりますでしょうか?
2013年の東京モーターショーで登場した四輪バイクのJ-Concept!
フルCGですし、変形しちゃうし、これはコンセプト止まりだろうなぁ。
でもかっこいいなぁ、さすがKawasaki!というモデルですよね。
2013年10月から時は流れ2018年1月。
まだあきらめていないですよーと言わんばかりにJ-Conceptの第二弾モデルが公式公開!
川崎重工の長い歴史をたどりながら最新モデルのH2が変身するかのようにJ-Conceptが登場するのは驚きですね。
でもやはりフルCGだし、デザインスタディーあるいはコンセプトスタディーでおしまいなんだろうなぁと誰もが考えていたと思います。
ところが先日、このジャンルの乗り物らしき技術特許がKawasakiから出され公知されました!
驚きの技術特許”傾斜可能車両”の内容はこちら!
傾斜可能車両と聞いても何が何だかわからないと思いますので、詳細を特許で出された図面で追いかけていきましょう。
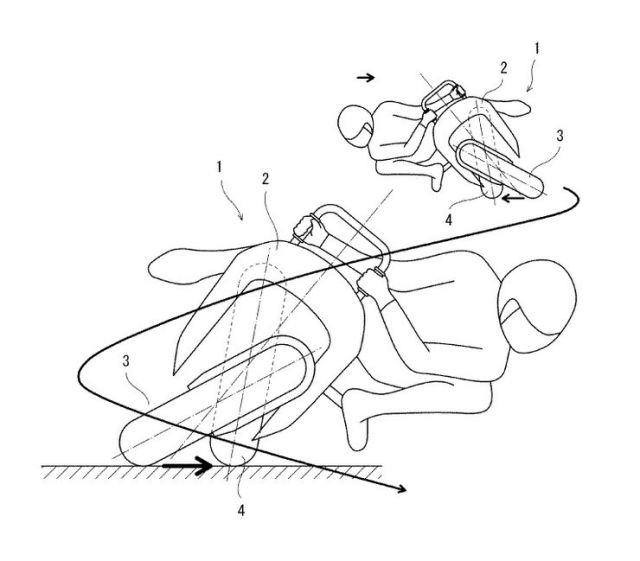
まずは特許の技術が適用された車両とライダーの側面図。
前後共にごついスイングアームのような構造でライダーはステアリングを切って旋回するのではなく、前後タイヤ共に倒れて(キャンバー角がついて)旋回することが見て取れます。
ごついスイングアームに対して驚くほど貧弱に見える取り付け点はご愛嬌。
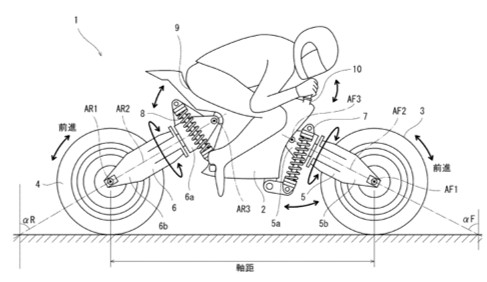
そのスイングアーム周りの図面がこちらです。
コンセプトを説明するための図面ですが、ハードとしての剛性が足りなく見えてしまう。。。
そこは気にしないことですね。
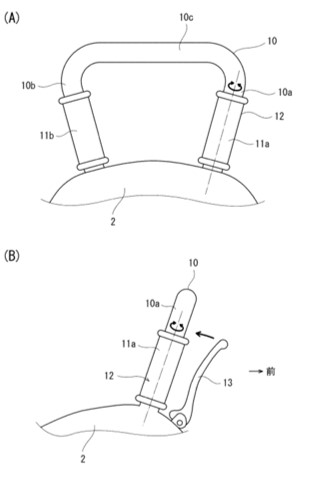
ハンドルバーの代わりにしがみつくバーとブレーキレバーがあります。
先進的な機構をにおわせながら、この図面だけ見るとかなりローテクを感じるのは私だけでしょうか?
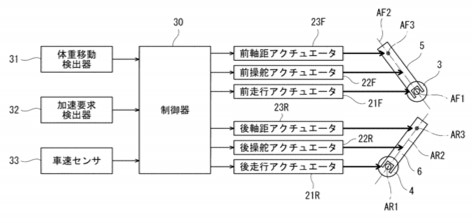
体重移動、加速要求、車速がECUに入り、スイングアーム自体を動かす(軸距)、スイングアームをひねる(操舵)、車輪をまわす(走行)をアクチュエータ制御するということです。
産業用ロボットなどはこのアクチュエータの塊なのですが、行動を走る乗り物でアクチュエータの塊を実現するのは強度耐久性やあらゆる品質面でなかなか難しいんです。
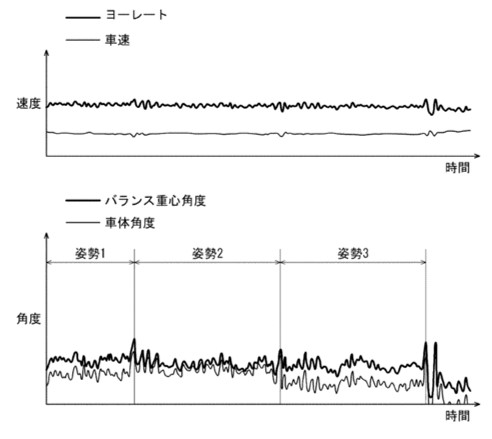
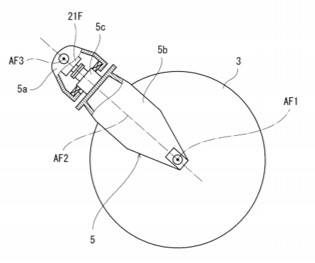
最後の図面では制御領域のネタになっています。
車速やヨーレート(旋回方向のモーメント)が概ね同様でも、車体の角度や重心角度をセンシングすれば姿勢が分かります、というもの。
これに関してはいきなり今回の特許のような複雑なモデルに適用するのではなく、量産車のスポーツマシンの姿勢に応じたトラクション、ブレーキのコントロールに活用してほしいですね。
すぐに実感し手に取れる性能になってくれることに期待です。